Иҷрои кор бо MPU-6050: танзим, калибрченкунӣ ва барномаҳо
2024-04-25
9250
Mpu 6050 Аввалинаи коркарди ҳаракати ҷаҳонии 6-меҳвари 6-меҳвари 6-меҳвари ҷаҳон, ки як љнќи 3-меҳвари 3-меҳварро муттаҳид мекунад, 3-меҳвари тезтар ва протсессори васеи рақамии рақамӣ (DMP).Мақсади истифодаи ин ба даст овардани кунҷи майзадаи объективӣ (ба монанди як квадкопер, мошини тавозунӣ) дар X, y, ва z AXES, яъне кунҷи рол ва кунҷи ѓам.Мо шаш маълумоти MPU-6050-ро мехонем (6050) -и суръатбахшии се меҳвари се-меҳвар ва дорои арзиши рекламаи кунҷии вояи атрофро тавассути интерфейси I2C мехонем.Пас аз ҷойгиркунии тайёра, қатрон, рол, рол ва кунҷҳои удӣ ҳисоб карда мешаванд.Ҳамчун як истинодҳои самт барои арзишҳои андозагирӣ, муайян кардани самтҳои коорификатсияи сенсор, ки дар соли зер нишон дода шудааст, ки принсипи системаи дасти росткунҷа дорад (яъне ангушти ангушти дурустро ба самти мусбати X-Меҳвар, нуқтаҳои ангушти индекс ба самти мусбати меҳвари Y-меҳвар ва ангуштони миёна ба самти мусбати меҳвари z-Axis. Роҳнамо).
Каталог

Бо автобуси махсуси I2C-и махсуси I2C, MPU-6050 қодир аст, ки воридро аз қутби берунии 3-меҳвари 9-сола гиранд, ки ҷараёни пурра 9-меҳвари AXIS-меҳварро пешниҳод кунад.Мушкилоти номатлуб байни ҷадвали якҷояшудаи Gyoscope ва SCRESCORER-ро нест мекунад ва дар муқоиса бо қарорҳои мултипликатсионӣ ба таври назаррас коҳиш медиҳад.Ҳангоми пайвастшавӣ ба магнитҳои се-меҳвар, MPU-60x0 қодир аст, ки баровардани ҳосилнокии ҳарбии 9-меҳвари 9-меҳварро барои I2C ё порти SPI-и худро таъмин кунад (қайд кунед, ки порти SPI танҳо дар MPU-6000 дастрас аст.
Алтернативаҳо ва муодилаҳо
- AIS328DR
- Mpu-3300
- Mpu-6000
- Mpu-6500
Истеҳсолкунандаи MPU-6050
Истеҳсолкунандаи MPU-6050 TDK мебошад.Пас аз ду муассисони TDK, доктор Юппа Като ва Рейно Чато, Ферритро ихтироъ карданд, онҳо Токио Деникагаку Когио K.k-ро таъсис доданд.Соли 1935. Ҳамчун як бренди электронии ҷаҳонӣ, TDK ҳамеша дар соҳаи ашёи хоми электронӣ ва ҷузъҳои электронӣ мавқеи бартаридошта буд.Портфели мукаммали маҳсулоти ғайримуқаррарӣ ва навовариҳои TDK, ба монанди мувофиқати комплексҳои сафолӣ, феҳристҳои алюминий, феҳристҳои алюминий, ҷузъҳои магистратсионӣ, дастгоҳҳои магнитӣ, дастгоҳҳои муҳофизатӣ ва системаҳо ва сенсор (ба монанди ҳарорат ва фишор,Илова бар ин, ва ғайра) ва ғайра. Ғайр аз ин, TDK инчунин дастгоҳҳои барқӣ, сарҳои магнитӣ ва дигар маҳсулотро пешниҳод мекунад.Брендҳои маҳсулоти он TDK, EPCOS, ESCOS, Devenнures, троянҳо ва TDK-Lambda дохил мешаванд.
Диаграммаи Блюзи дохилӣ mpu-6050
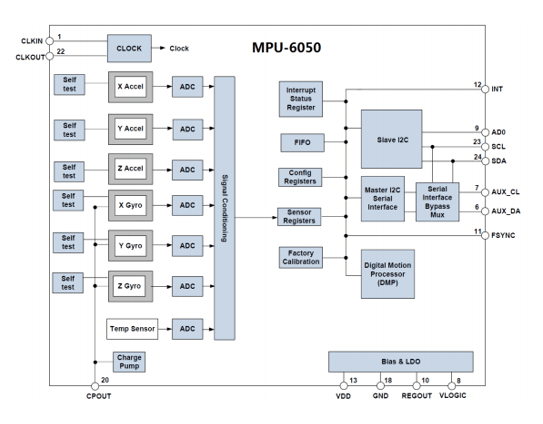
Дар байни онҳо, SCL ва SDA интерфейсҳои IIC мебошанд, ки ба МКҲ робита доранд ва MCU тавассути ин интерфейси IIC MPU-6050-ро идора мекунад.Интерфейси IIC, яъне AUX_CLE ва AUX_DA вуҷуд дорад.Ин интерфейс метавонад барои пайваст кардани дастгоҳҳои ғуломи беруна, ба монанди сенсорҳои магнитӣ истифода шавад, то сенсори нӯҳ меҳварро ташкил кунанд.Vlogic шиддати ман аст.Ин PIN метавонад ҳадди аққал 1.8V дастгирӣ кунад.Мо одатан онро мустақиман ба VDD пайваст мекунем.AR0 суроғаи назорати нишони интерфейси ғуломи ғулом мебошад (ба MCU пайваст шудааст).Ин PIN каме суроғаи IIC-ро назорат мекунад.Агар он ба GND пайваст карда шуда бошад, суроғаи Iic-и MPU-6050 аст 0x68;Агар он ба VDD алоқаманд бошад, он 0x69 аст.Лутфан таваҷҷӯҳ намоед, ки суроғаи он дар ин ҷо интиқоли пасттарини маълумотро дар бар намегирад (Бисари паст барои ифодаи кор ва навиштан истифода мешавад).Дар MWBALANCEDSTC15, AD0 ба GND пайваст аст, бинобар ин суроғаи Iic-и MPU-6050 аст 0x68 (ба истиснои битзали пасттарин).
Интерфейси IIC-ро оғоз кунед
MPU-6050 Истифодаи II-ро барои муошират бо STC15 истифода мебарад, аз ин рӯ мо бояд хатҳои маълумотии SDA ва SCLICT-ро аввал пайваст кунем.
Бозсозӣ mpu-6050
This step restores all registers inside the MPU-6050 to their default values, which is achieved by writing 1 to bit7 of the power management register 1 (0x6B).Пас аз барқароркунӣ, Феҳристи идоракунии барқ ба арзиши пешфарз баргардонида мешавад (0XX40) ва ин феҳрист бояд минбаъд ба 0X00 барои бедор кардани MPU-6050 ва ба ҳолати мӯътадили корӣ оварда шавад.
Доираи пурраи сенсори Velofic Velofic (Gyro) ва санҷандаи суръатбахшро таъин кунед
Дар ин марҳила, мо дар Феҳристи танзимоти муҳкири Gyoscope як қатор миқёсро (FSR) ва сабти конфигуратсияи экспедитсионӣ (0x1c) нишон додем.Одатан, мо доираи пуриқтидори gyoscopebopро ба ± 2000DPS ва доираи пурраи суръатфизои суръатро ба ± 2G гузоштем.
Параметрҳои дигарро танзим кунед
Дар ин ҷо, мо низ бояд параметрҳои зеринро танзим кунем: Қатъи халалро хомӯш кунем, FEDO-ро ғайрифаъол кунед, Қурби намунаҳои Gyoscope-ро хомӯш кунед ва филтри Advalcop-и рақамии рақамиро (DLPF танзим кунед).Азбаски мо барои хондани маълумот дар ин боб мубориза намебинем, функсияи муҳити зист бояд хомӯш карда шавад.Ҳамзамон, азбаски мо интерфрессияи AUSC I2C-ро истифода набарем, то дигар сенсорҳои берунаро истифода набарем, мо низ бояд ин интерфейсро пӯшем.Ин функсияҳоро тавассути қатъ кардани сабти ном (0X38) ва сабти назорати истифодабарандагон (0x6a) идора кардан мумкин аст.MPU-6050 метавонад барои нигоҳ доштани маълумоти сенсор FYEFO-ро истифода барад, аммо мо онро дар ин боб истифода накардаем, аз ин рӯ ҳамаи каналҳои панҷмо бояд баста шаванд.Инро тавассути Феҳристи FIFO-и Феҳристи FIFO (0X23) идора кардан мумкин аст.Бо нобаёнӣ, арзиши ин феҳрист 0 (ин аст, ин аст, - FIFO хомӯш карда мешавад), то мо қобилияти пешфарзро бевосита истифода барем.Қурби интихоби gyroscope аз ҷониби интихоби сабти номи тақсимоти қимат (0X19) идора карда мешавад.Одатан, мо ин суръати интихобро ба 50 мегузоремУмуман, мо ба нисфи фарохмаҷф дар дақиқӣ ва суръати ҷавоб) -ро ташкил хоҳем дод.
Манбаи соатҳои системаро танзим кунед
Танзими манбаъи соатҳои система аз идоракунии қудрати аз феҳристи идоракунии энергия вобаста аст 1 (0X6B), ки дар он се байт аз ин нома интихоби манбаи соатро муайян мекунад.Бо нобаёнӣ, ин се битҳо ба 0 таъин шудаанд, ки система ҳамчун манбаи дохилии 8MHZ RC USCARMATER-ро истифода мебарад.Аммо, барои такмили дақиқии соат, мо зуд-зуд онро ба 1 мегузорем ва дар бораи манбаи соат X-Axis -ро интихоб мекунем.Илова бар ин, имкон медиҳад, ки сенсори вироиш ва санҷиши суръатбахшӣ низ як қадами муҳим дар раванди ибтидоӣ мебошад.Ҳарду ҷонибҳо тавассути феҳристи идоракунии барқ 2 (0x6c) амалӣ мешаванд.Барои фаъол кардани сенсори мувофиқ каме ба 0 каме ба 0 танзим кунед.Пас аз пур кардани қадамҳои дар боло зикршуда, MPU-6050 метавонад ба ҳолати муқаррарии корӣ ворид шавад.Он шӯъбаҳо, ки махсус таъин нестанд, арзиши пешфарзро аз рӯи система қабул намекунанд.
MPU-6050 кор мекунад?
Сенсор
Сенсор бо gyro дар дохили муҷаҳҳаз аст, ки ҳамеша ба самти аввалини он вобаста ба таъсироти гироскопӣ ҳамеша мувозӣ хоҳад кард.Аз ин рӯ, мо метавонем дастур ва кунҷи ротатсияро тавассути ошкор кардани тамаркузи Гиро аз самти аввал ҳисоб кунем.
Санҷиши суръатбахш
Санҷиши суръатбахшанда дастгоҳест, ки суръатбахширо чен кунад ва он дар асоси принсипи таъсири пиезоэекрасӣ кор мекунад.Ҳангоми шитоб, сенсор барои бастаи оммавӣ маҷбурии таъсиррасонӣ татбиқ карда мешавад ва сипас арзиши суръатбахширо бо истифодаи қонуни дуввуми Ню Мартон ҳисоб мекунад.
Протсессори ҳаракати рақамӣ (DMP)
DMP модули коркарди додаҳо дар чипи MPU6050 аст, ки алгоритми контрастаи Kalman барои ба даст овардани маълумот аз syroscope ва сенсорҳои суръатбахш ва коркарди моделҳои баромад мебошад.Ин хусусият сарбории кории микропрессро ба таври назаррас коҳиш медиҳад ва раванди ниҳоии филтадориҳои дилгиркунанда ва додаҳоро пешгирӣ мекунад.
Эзоҳҳо:
Сандубҳо: Сандубҳо рақамҳои оддии суперсатсиплександ.Рақамҳои мураккаб аз рақамҳои воқеӣ иборатанд ва қисми хаёлии ман, ки ман дар он ҷо ҳастам ^ 2 = -1.
Mpu 6050 истифода мешавад?
- бозичаҳо
- Гуюс ва бозӣ
- Назорати бозии ҳаракат
- Технологияи blurfree ™ (барои видео / Ҳанӯз сатҳи мӯътадил)
- Техникии AirSign ™ (барои амният / тасдиқкунанда)
- Inststration ™ ig ™ ™ эътироф
- сенсорҳои беохир барои саломатӣ, фитнес ва варзиш
- Чаҳорчӯби фаъол ва барнома
- Технологияи Teampommand ™
- Хадамоти ҷойгиршавӣ, нуқтаҳои фоизҳо ва ҳисобкунии мурд
- назорати дурдасти Интернет барои Интернет DTVS ва қуттиҳои боло, мушҳои 3D-ро танзим кунед
- Технологии • Технология *
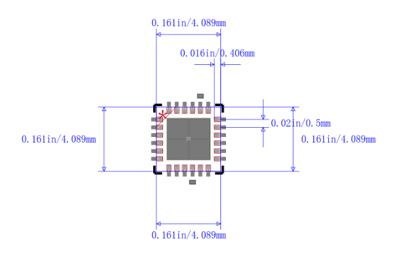
Бастаи mpu-6050
Овози MPU-6050-ро чӣ гуна коҳиш додан мумкин аст?
Мо метавонем роҳҳои зерини коҳиш додани садои MPU-6050-ро гирем.
Истифодаи санҷандаҳои калибр
Сохтани суръат ва гроскопи MPU-6050 метавонад ғарқ ва хатогиро аз худ дур кунад ва таъсири садо кам кунад.Раванди калибркунӣ одатан аз ду марҳила иборат аст: калибрченкунии статикӣ ва калибрченкунии ҳарбӣ.
Раванди филтркунии сахтафзор
Илова кардани иқтибосҳои филтр ба хати барқии MPU-6050 метавонанд таъсири садои барқро дар сенсор кам кунанд.Дар ҳамин ҳол, ҳангоми тарҳбандии PCB, мо бояд кӯшиш кунем, ки MPU-6050-ро аз сарчашмаҳои эҳтимолии дахолат, ба мисли хатҳои басомади басомад ва ҷузъҳои баландсифат нигоҳ дорем.
Коркарди филтркунии нармафзор
Пас аз ҷамъоварии маълумоти хом аз mpu-6050, мо метавонем як истгоҳи филтри нармафзорро илова намоем, то маълумоти авваларо барои бартараф кардани дахолати садоҳоён илова кунем.Усулҳои филмҳои маъмулӣ истифода бурда мешавад.
Истифодаи филтри ҳавопаймоии пастсифат
MPU-6050 дорои филтри маҷмӯаи дохилӣ ва гузаришҳои рақамии рақамии рақамӣ, ки метавонад садои басомади баландро бо гузоштани басомади басомад истифода кунад.Махсусан, мо метавонем филтри контофт-филтри контилятсияи рақамиро тавассути тағир додани Феҳристи танзимоти MPU-6050 барои рафъи садои басомади интихобшуда, ки аз ҷониби GRE / D ба вуҷуд омадааст, таъин кунем.
MPU-6050-сола
MPU-6050 аст, ки шаш меҳвари шасти меҳвари шаш-меҳвар аст ва санҷандаи gyoscope, ки барои чен кардани ҳаракат ва муносибати объектҳо истифода мешавад.Ҳисобкунии интиқоли траектория дар асоси MPU-6050 метавонад бо қадамҳои зерин амалӣ карда шавад:
Қадами аввал ин хондани маълумоти сенсор аст.Мо бояд маълумоти SIRERCERMEMEMEMEMEMEMEMEMEMEMEMEMEMEMEMEMEM-ро хонем, ки аз STU-6050 сенсорҳои MPU-6050-ро истифода барем.Ин маълумотҳо одатан дар формати рақамӣ баромаданд, аз ин рӯ баъзе мубодилаҳо ва кории калибрҷкунанда бояд онҳоро ба ченакҳои воқеии воҳидҳои физикӣ табдил диҳад.
Қадами дуюм ҳисоб кардани суръат аст.Аввалан, мо бояд маълумотро аз суръатрометр коркард кунем, то ки суръатбахшии объектро дар ҳар меҳвар ба даст орем.Баъдтар, бо мақсади ҳисоб кардани суръат ва муҳоҷирати объекти объект дар ҳар меҳвар, мо бояд маълумоти суръатро муттаҳид созем.Техникаҳои рақамии ҳамгироӣ, ба монанди усули элер ё усули Лунигон-Kutta, аксар вақт дар ин раванд барои таъмини ҳисобҳои кӯчонидани аҳолӣ истифода мешаванд.
Қадами сеюм ҳисоб кардани суръати кунҷӣ мебошад.Бо истифода аз маълумоти gyoscope, суръати кунҷии иншоот дар ҳар меҳвар метавонад ҳисоб карда шавад.Боз ҳам, ин маълумот бояд калибриро санҷида, табдил диҳад, то ба воҳиди вироишҳои воқеии физикӣ табдил ёбад.
Қадами чорум ин ҳисоб кардани гардиш аст.Бо ҳамгироии маълумоти Veloce Velocity, кунҷи гардиши объект дар ҳар меҳвар ҳисоб карда мешавад.Инро бо истифодаи усулҳои адабии ин ҳамгироӣ, ба монанди усули эререр ё усули kutta kutta kutta барои ҳисоб кардани кунҷ.
Қадами панҷум якҷоя кардани маълумот аст.Мо маълумотро аз shadererometers ва giroscopes барои гирифтани муносибат ва мавқеи ашё муттаҳид мекунем.Инро метавон бо истифодаи алгоритмҳо, ба монанди ҳалкор ё садои кунҷи ҳавопаймои хомушти бинои калонанд.
Қадами шашум тасаввур кардани натиҷаҳо аст.Мо траекторияи интиқоли объективиро ба маҷмӯи нуқтаҳои координатори 3D табдил медиҳем ва бо истифода аз воситаҳои визуалӣ барои фаҳмиши бештари Траектория ва муносибати объекти объекти объекти объекти объекти объекти объекти объекти объекти объект ҷойгиранд.
Саволҳои зуд-зуд пурсидашуда [FAQ]
1. Чӣ қадар номуваффақ mpu6050 аст?
Натиҷаҳои харидорӣ дақиқии кофии камтар аз 1% ва эътимоднокии ҳолати дурусти чоҳи лифт ва стандартҳои баланди саноати бардоштанро нишон доданд.
2. Маълумоти хонданро аз MPU6050 хонед?
Барои хондани регистрҳои дохилии MPU6050, устод як ҳолати оғозро мефиристад, пас аз он суроғаи ғуломи I2C ва каме навиштан ва баъд суроғаи хонда шуданро дорад.
3. Дар куҷо mpu6050 истифода мешавад?
Дар дастгоҳҳои пайгирии саломатӣ, фитнес-пайгирӣ.Дар DRones ва квадкоперҳо, Mpu6050 барои назорати мавқеъ истифода бурда мешавад.Дар назорати бозуи роботӣ истифода мешавад.Дастгоҳҳои назорати дастии дастӣ.
4. Оё mpu6050 аст?
Блоки сенсори MPU6050 аз сенсори Sensue Senser маълумотро аз сенсаи MPU-6050 мехонад, ки ба сахтафзор пайваст аст.Суръати натиҷаҳои блокҳо, меъёри кунҷӣ ва ҳарорат дар меҳварони сенсор.
5. Коркарди MPU6050 чӣ гуна аст?
Ин протсессори дӯконҳои MPU6050 аст, ки маълумотро аз суръатфизо ва giroscope якҷоя мекунад.DMP калиди истифодаи MPU6050 мебошад ва баъдтар муфассал шарҳ дода мешавад.Тавре ки дар ҳама микросхӯргарони DMP ниёз ба корношоям, ки ба кор даромадааст.
Озмоиши функсия.Маҳсулоти олии сарфа-муассир ва беҳтарини беҳтарин ӯҳдадории абадии мо аст.
Мақолаи гарм
- Cr2033 ва CR2016 интерфаъол аст
- Мосфет: Таъриф, принсипи корӣ ва интихоб
- Насбкунӣ ва санҷиши Рейн, тафсири диаграммаҳои рейтинги эҳтимолӣ
- CR2016 vs. cr2032 Фарқият чист
- Ns. pnp: фарқият чист?
- ESP32 VS STM32: Кадом микрокронтер барои шумо беҳтар аст?
- LM358 Дастури мутақобилаи амбизатсия
- Роҳнамои CR2032 vs DL2032 vs Crym Cryr Cryms Муқоиса
- Фаҳмиши фарқиятҳо Esp32 ва ESPP32-S3 S3
- Таҳлили муфассали силсилаи RC ноҳияи RC
 Омӯзиши қобилиятҳо ва барномаҳои NRF24L01
Омӯзиши қобилиятҳо ва барномаҳои NRF24L01
2024-04-25
 MMBT3904 NPN Transyor: мушаххасоти он, дастурҳои ҳамаҷонибаи ариза ва MMBTINGINGILINGION VS. MMBT5551
MMBT3904 NPN Transyor: мушаххасоти он, дастурҳои ҳамаҷонибаи ариза ва MMBTINGINGILINGION VS. MMBT5551
2024-04-25
Рақами қисми гарм
 GRM1555C2A3R0CA01D
GRM1555C2A3R0CA01D UMK105CG151JVHF
UMK105CG151JVHF CL05C101JB5NCNC
CL05C101JB5NCNC- GRM1555C1E221JA01D
 CS1206KRX7RYBB681
CS1206KRX7RYBB681 TAP475K035CCS
TAP475K035CCS MAX3222EAP+T
MAX3222EAP+T MCP1725-1202E/SN
MCP1725-1202E/SN VE-J41-CY
VE-J41-CY A40MX04-PL44
A40MX04-PL44
- BR24L16FVM-WTR
- SRN4018TA-100M
- VI-204-MX
- RT1206BRD0711KL
- 7MBP75TEA060-02
- S912ZVL64F0MLF
- LTC2850CMS8#TRPBF
- LM25061PMMX-2/NOPB
- 2SD300C17A2
- LMP2234AMAE/NOPB
- 5308 707
- TPD12S016PWR
- T491D155M050AHAUTO
- VL-HDW-416
- 74LVC373A
- AM29LV320DT-90EF
- HD64F3687H
- HSMP-3814
- IDT74LVC162244APA
- IS61LV3216-12K
- LA6584-MPB-E
- MAX4430EUA
- MB3802PF-G-BND
- MBM29F002TC-90PD
- NJU6432BFG1
- PL560-37OCL
- TDF8704T/4
- CS75824E
- HY29F002TC-70
- MD2764A-25/B
- MST6M68FQC-LF-Z1
- WP91346L
- OR2T15B-7S208-DB
- SC667491VLD4
- BCM53003B0IPBG
- CC2640F128RGZR.
- VI-B64-EU-03/F2
- XC7Z045-3FFG900I
- RG82845GVES